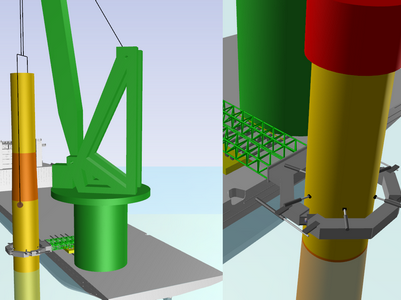
MONOPILE GRIPPERS
Monopile grippers are essential tools for maintaining the vertical position of monopiles during hammering, preventing them from falling over. Traditionally, this task has been performed using Jack Up ships. However, there is a growing trend towards using Dynamic Positioning (DP) crane vessels for this purpose. The monopile gripper on a crane ship must compensate for the vessel’s movements, transforming it into a highly dynamic system.

SYSTEM DYNAMICS
The loads on a dynamic monopile gripper are quite large, which puts limits onto the power and the speed of the system. With system dynamics, we investigate these limits and see how they affect the design of the gripper. The basis is a parameterized 3D simulation model of the ship, the crane and the gripper. Environmental loads in the form of wind, waves, current and the soil conditions are added as well as the gripper control system. Controllab is one of the few companies who are able to couple all of these simulation models and run simulations to test the performance of the gripper.
CONTROL SOFTWARE
Controllab has a set of of control system solutions that help to control a monopile gripper in any environmental condition:
-
Compensate for the motion of the crane ship in waves.
-
Maintain the upright position of the monopile.
-
Prevent overload.
DIGITAL TWIN
The coupling of a 3D simulation model with the control PLC’s is known as Hardware-in-the-Loop (HIL) simulation. With HIL simulation, the complete gripper control system can be tested, before it is actually built.