Motion Compensated Pile Grippers
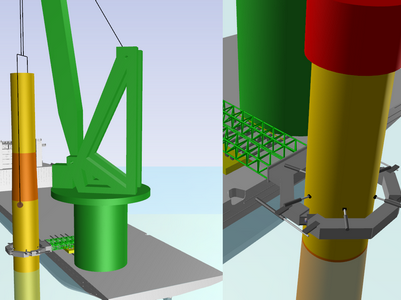
Controllab has carried out a simulation study for placing monopiles with a motion compensated pile gripper. It is based on a simulation model that includes the crane vessel, a crane, a monopile and a motion compensated pile gripper. Simulations have been carried out to investigate the forces and torques acting on various points in the system. Also, the required power and stability of the pile gripper have been evaluated. In the study, a generic vessel, crane and pile gripper are used. These components can easily be replaced to investigate specific designs for third parties.
Do you want to know more about this study?
Download the product sheet here.